[논문리뷰] YOLO v1
You Only Look Once: Unified, Real-Time Object Detection (2016)
1. Introduction
기존의 R-CNN 계열의 detection 모델들은 localization과 classification 파트가 분리 되있는 2-stage-detector였지만 YOLO는 bounding box 예측과 classificaion을 동시에 수행하는 1-stage-detector를 제시하였다.
YOLO의 장점은 다음과 같다.
- Object detection을 regression 문제로 변환해 단순화 하여 실시간으로 detection이 가능해졌다. (엄청나게 빠른 속도)
- 기존 detection 방식은 예측된 bounding box 내부만을 이용해서 클래스를 예측하는데 YOLO는 전체 이미지를 통해 bounding box의 class를 예측한다.
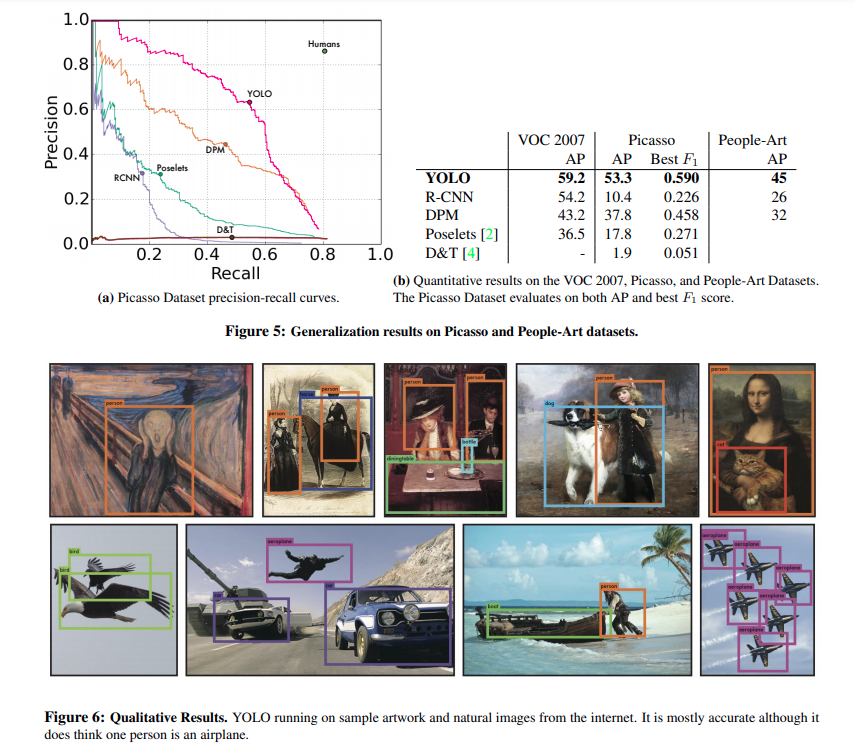
- 학습한 이미지에 대한 예측 뿐 아니라 다른 도메인의 이미지에도 어느정도 괜찮은 성능을 보였다.
하지만 당시 새로 나온 구조라서 그런지 YOLO v1은 단점도 적지않은데 단점은 아래에서 나올 것이다.
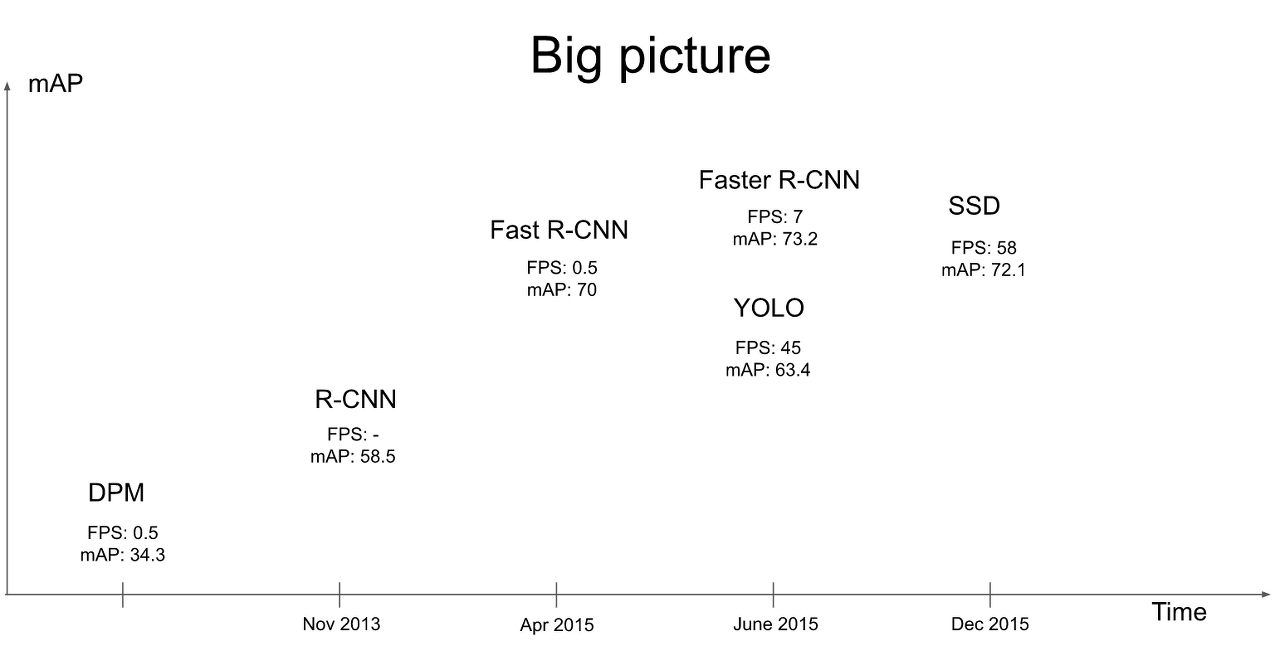
2. Unified Detection
위에서 언급한 것 처럼 YOLO v1에서는 end-to-end 방식으로 하나의 convolution network를 거쳐서 마지막 feature_map에서 bounding box와 class를 예측한다.
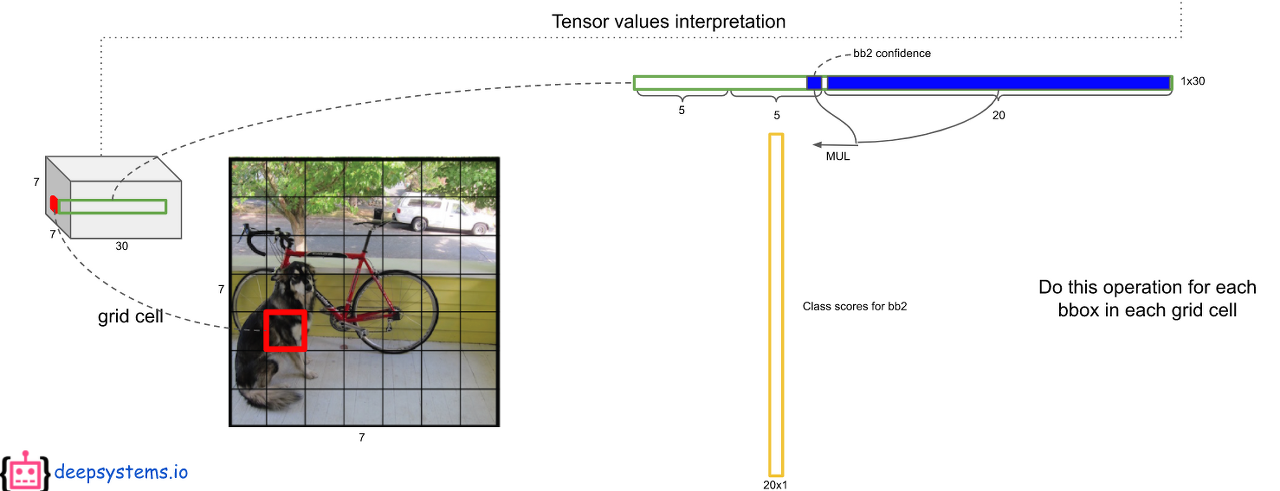
모델의 최종 feature map은 7 x 7 x 30의 사이즈를 가지고 있게 되고 이것을 49개의 영역의 grid cell로 보고 각 grid cell에서 2개의 bounding box와 class를 예측을 하게 된다.
즉 7 x 7 x 30 의 의미는 다음과 같다.
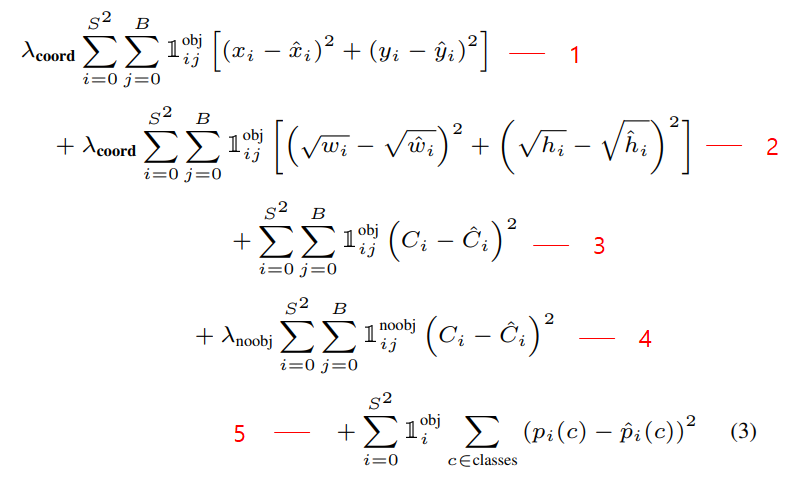
- 7 x 7 x 30 == S x S x (5 x B + C)
- S = feature size : 7
- 5 = (cx, cy, w, h, conffidence)
- B = number of boxes : 2
- C = classes : 20 (PASCAL VOC dataset)
yolo의 conffidence score는 Pr(Object) x IOU 로 물체가 있을 확률과 실제 물체의 bounding box와 예측 bounding box와의 iou를 곱해서 구하게 된다.
각 grid cell 하나하나는 20개의 클래스에 대한 예측 값들을 가지게 된다. 위 그림의 grid cell을 여러가지의 색으로 구분한 그림을 보자. 서로 다른 색은 서로 다른 클래스이고, 각 그리드 셀에서 가장 높게 예측된 클래스의 색을 칠하면 위와 같은 그림이 나올 것이다.
2-1. Network Design
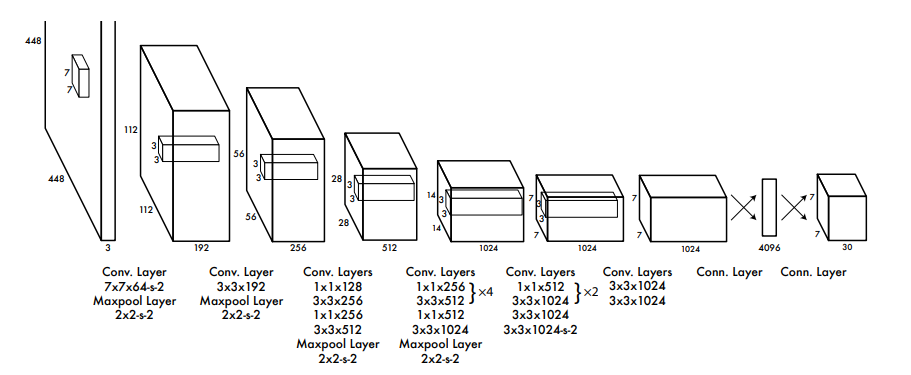
YOLO v1은 GoogLeNet의 네트워크 구조를 모티브로 하였고 총 24개의 conv layer와 2개의 FC layer를 포함하고 있다. GoogLeNet의 inception을 가져와 1x1 conv를 활용하여 연산량을 줄이려고 하였고 그 외의 모든 conv layer에서는 3x3 filter만 사용하였다.
참고로 논문에서는 왼쪽 20개의 conv layer는 GoogLeNet을 이용하여 ImageNet classification에 사용된 weight를 가져와 fine tuning하였는데 구현 코드에서는 그냥 처음부터 학습을 시켰다.
2-2 Training
YOLO v1은 위와같은 Multi Loss를 사용하였다. 특이한 점은 CrossEntropy가 아닌 SSE(Sum Square Error)를 사용했다는 것인데 구간별로 천천히 살펴보자
lambda_coord : 5
lambda_noobj : 0.5
- Localization loss : x, y값을 regression하는 SSE loss
- Localization loss : width, height값은 regression하는 SSE loss
- Confidence loss : object가 있는 곳의 confidence SSE loss
- Confidence loss : object가 없는 곳의 confidence SSE loss
- Classification loss : object가 있는 곳의 각 class별 SSE loss (각 셀당 1개의 class probability가 나오므로 ij가 아닌 i뿐)
참고로 loss를 구하기 전에 미리 ground truth쪽 confidence와 해당 클래스의 인덱스에 1을 할당해준다.
2-3 Inference
테스트할 때, 성능을 확인하기 위해서 최종적인 bounding box를 예측해야 한다.
첫번째로 ouput 에서 예측된 bbox의 confidence score와 class score를 곱한다.
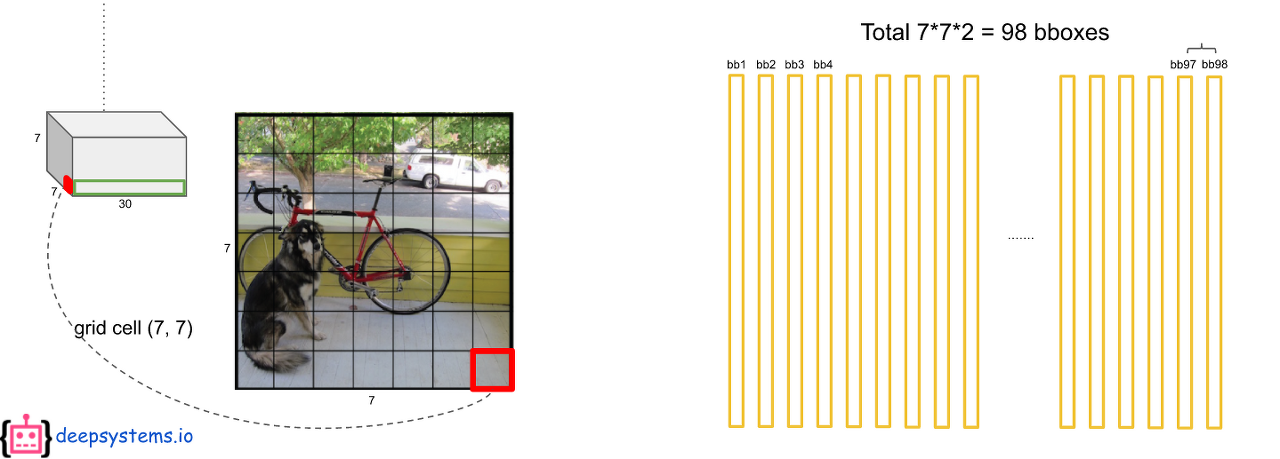
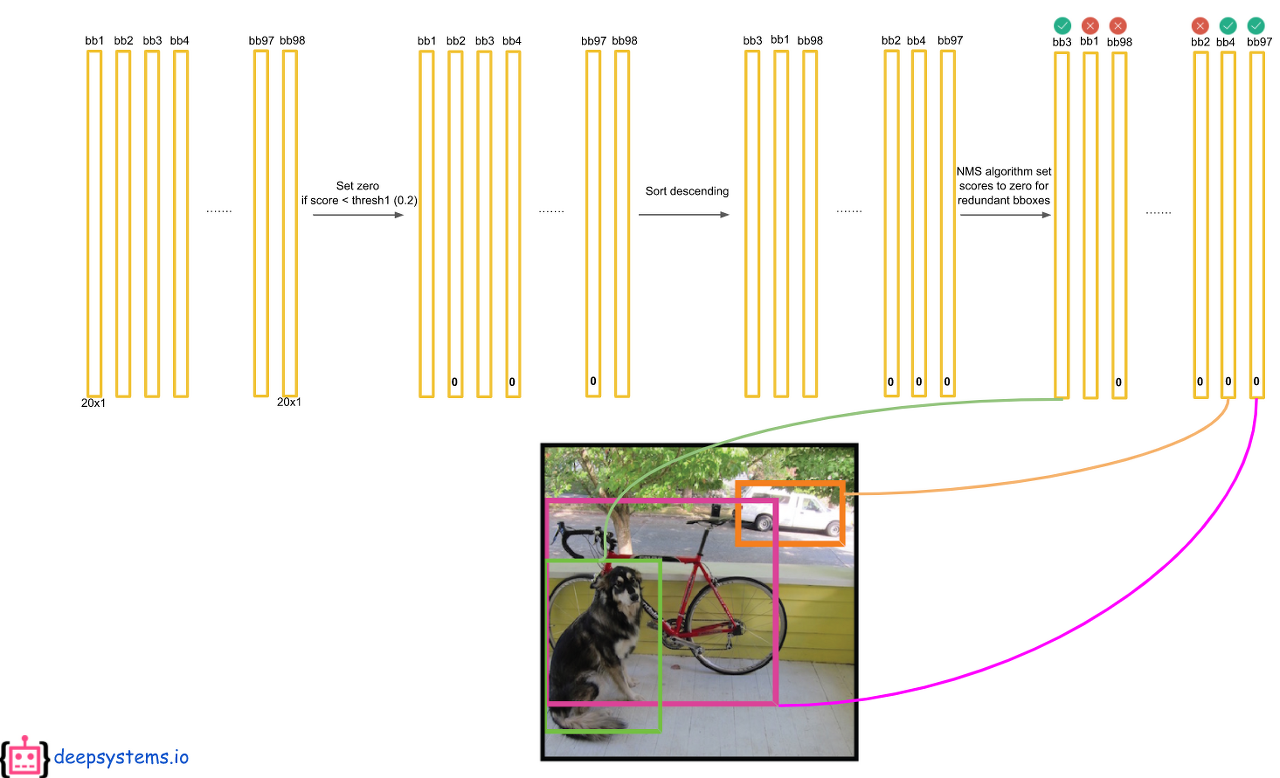
7 x 7의 각 grid cell에 2개의 bbox를 예측하므로 총 98개의 막대(20 x 1 벡터)가 나오게 된다. 그러면 최종적으로 98 x 20 = 1440개의 값이 나오는데 이것을 어떻게 처리해야 한 물체에 하나의 bbox가 나오게 될까?
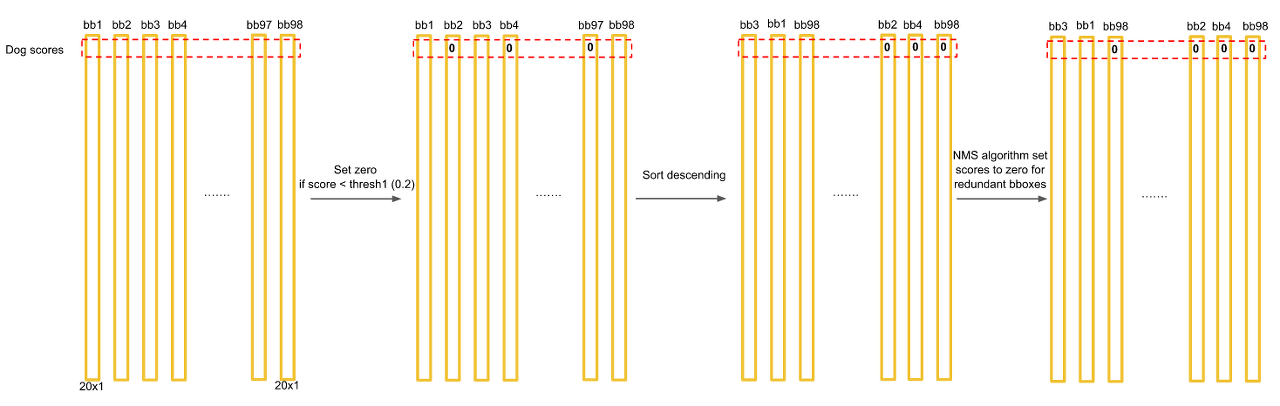
먼저 1440개의 값중에 0.2(Threshold)보다 작은 값들은 모두 0으로 만든다. 그 후에 클래스별로 내림차순으로 정렬을 하고 NMS 기법을 통해서 최종 detection output을 만들어 낸다. NMS는 아래 포스팅에서 자세히 다뤘으니 넘어가겠다.
[NMS(Non Max Suppression)
NMS(Non Max Suppression) 이번 포스팅 에서는 IOU에 이어서 NMS(Non Max Suppression)에 대해 알아보려고 한다. NMS는 여러 Object Detection논문(YOLO, SSD 등)에서 사용한 방법으로 각각의 물체에 대한 bound..
visionhong.tistory.com](https://visionhong.tistory.com/11)
모든 클래스에 대해 NMS을 적용하면 대부분의 값들이 0으로 만들어 질 것이다.
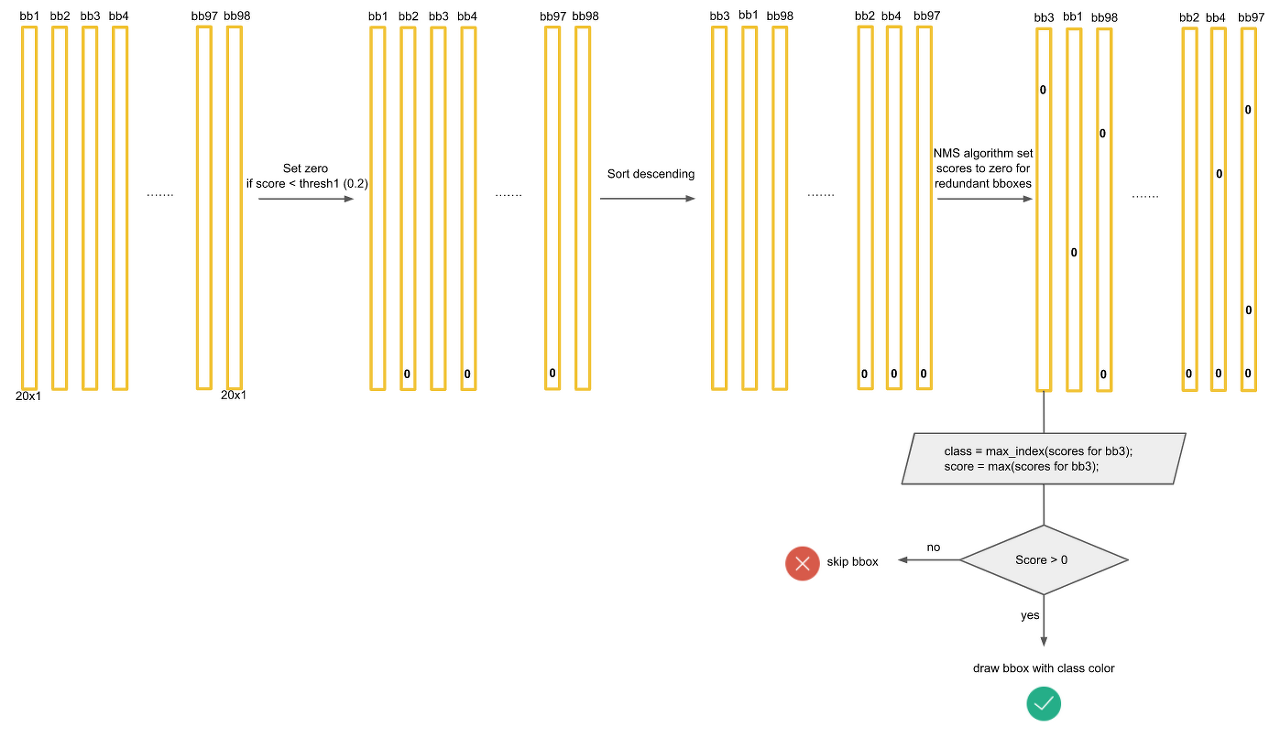
마지막으로 각 bbox에 대해서 가장 크게 예측되고 0보다 큰 클래스만 뽑아내면 아래와 같이 몇개의 막대만 살아남게되고 이것이 최종 output이 된다.
2.4 Limitations of YOLO
- YOLO는 1개의 grid cell당 1개의 class만 취급하기 때문에 2개 이상의 물체들의 중심이 한 grid cell에 모여있더라도 한가지의 class만 예측할 수 있다. 그렇다는 것은 새 떼와 같은 작은 물체들이 모여있을때 감지를 하지 못하게 된다.
- 일정한 비율의 bbox로만 예측을 하다보니 색다른 비율을가진 물체에 대한 예측이 좋지 못하다. -> 일반화가 어려움
- 작은 bbox의 loss와 큰 bbox의 loss를 동일하게 처리한다. -> 큰 상자의 작은 움직임에 비해 작은 상자의 작은 움직임은 훨씬 더 큰 형향을 끼치기 때문
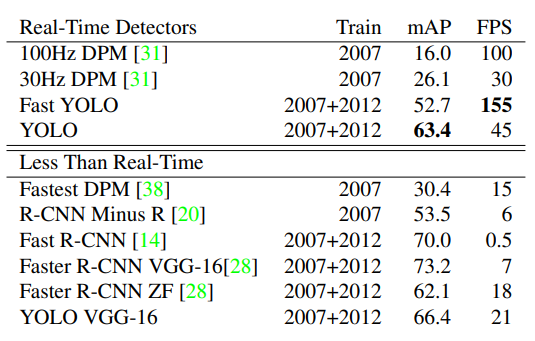
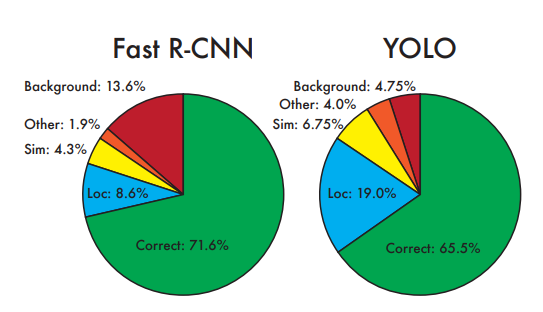
이러한 단점들로 인해 YOLO v1의 속도는 엄청 빠르지만 반면에 정확도가 SOTA에 비해 낮았다.
3. Experiments
4. Conclusion
- one stage detector로서 엄청 빠르다. (Real Time Object Detection)
- 다른 도메인에서도 빠르고 나름 괜찮은 성능을 보인다.
- 하지만 단점이 많다. (YOLO v2 부터 많은 개선이 일어남)
Pytorch 구현(Colab)
!mkdir train
!mkdir test
!wget http://pjreddie.com/media/files/VOCtrainval_06-Nov-2007.tar -P train/
!wget http://pjreddie.com/media/files/VOCtest_06-Nov-2007.tar -P test/
!tar -xf test/VOCtest_06-Nov-2007.tar -C test/
!tar -xf train/VOCtrainval_06-Nov-2007.tar -C train/
!rm -rf test/VOCtest_06-Nov-2007.tar
PASCAL VOC 2007 데이터를 train, test 폴더를 만들어서 받아온다.
!pip install xmltodict
!pip install -U albumentations
- xml파일을 parsing하기 위해 xml라이브러리 대신 xmltodict이라는 라이브러리를 설치
- augmentation을 위한 albumentations 라이브러리 설치
root_dir = '/content'
annot_f = './{}/VOCdevkit/VOC2007/Annotations'
image_f = './{}/VOCdevkit/VOC2007/JPEGImages/{}'
classes = ['person', 'bird', 'cat', 'cow', 'dog', 'horse',
'sheep', 'aeroplane', 'bicycle', 'boat', 'bus', 'car',
'motorbike', 'train', 'bottle', 'chair', 'dining table',
'potted plant', 'sofa', 'tv/monitor' ]
num_classes = len(classes)
feature_size = 7
num_bboxes = 2
파일 경로와 PASCAL VOC class 정의
import sys
from torch.autograd import Variable
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
import torch.optim.lr_scheduler
from torch.utils.data import Dataset, DataLoader
device = torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')
## utils
import numpy as np
import random, math, time
from tqdm.notebook import tqdm
## File Loader
import os, xmltodict
import os.path as pth
from PIL import Image
# Draw Image
import matplotlib.pyplot as plt
import matplotlib.patches as patches
## Transformer
from random import sample
import albumentations as A
from albumentations.pytorch.transforms import ToTensor
# Seed
random.seed(53)
필요한 라이브러리, 모듈 import
def draw_image(image_info, w=448, h=448, transforms=None):
im = np.array(Image.open(image_f.format('train', image_info['image_id'])).convert('RGB').resize((w,h)), dtype=np.uint8)
# Create figure and axes
fig, ax = plt.subplots(1, figsize=(7,7))
bb = image_info['bboxs']
la = image_info['labels']
if transforms:
sample = transforms(image=im, bboxes=bb, category_ids=la)
im = sample['image'].permute(1,2,0).numpy()
bb = sample['bboxes']
la = sample['category_ids']
# Display the image
ax.imshow(im)
for b, l in zip(bb, la):
# top left (x, y) , (w, h)
rect = patches.Rectangle((b[0]*w,b[1]*h),(b[2]-b[0])*w,(b[3]-b[1])*h,linewidth=1,edgecolor='r',
facecolor='none')
# Add the patch to the Axes
ax.add_patch(rect)
props = dict(boxstyle='round', facecolor='red', alpha=0.9)
plt.text(b[0]*w, b[1]*h, classes[l], fontsize=10, color='white', bbox=props)
plt.axis('off')
plt.show()
시각화

def get_infos(annot_f=annot_f, mode='train'):
annot_dir = annot_f.format(mode)
result = []
for ano in [pth.join(annot_dir, ano) for ano in os.listdir(annot_dir)]:
f = open(ano) # xml 파일 하나씩 읽어들임
info = xmltodict.parse(f.read())['annotation']
image_id = info['filename']
image_size = np.asarray(tuple(map(int, info['size'].values()))[:2], np.int16)
w, h = image_size
box_objects = info['object']
labels = []
bboxs = []
for obj in box_objects:
try:
labels.append(classes.index(obj['name'].lower())) # 0~19 사이
bboxs.append(tuple(map(int, obj['bndbox'].values())))
except: pass
# Resizing Box, Change x1 y1 x2 y2
# albumentations (normalized box)
bboxs = np.asarray(bboxs, dtype=np.float64)
try:
bboxs[:, [0,2]] /= w
bboxs[:, [1,3]] /= h
except: pass
if bboxs.shape[0] or mode=='test':
result.append({'image_id':image_id, 'image_size':image_size, 'bboxs':bboxs, 'labels':labels})
return result
trval_list = get_infos()
test_list = get_infos(mode='test')
len(trval_list), len(test_list)
- xml파일을 읽어서 필요한 정보만 parsing해서 딕셔너리를 감싼 리스트로 반환
- len(traval_list) = 3067
- len(traval_list) = 4952
``` python def get_tv_idx(tl, k=0.5): total_idx = range(tl) # (0,3067) train_idx = sample(total_idx, int(tl*k)) # 3067/2 개만큼 뽑음 valid_idx = set(total_idx) - set(train_idx) # 안뽑힌 index들이 valid_idx return train_idx, list(valid_idx)
train_idx, valid_idx = get_tv_idx(len(trval_list))
trval_list = np.asarray(trval_list) # list -> array train_list = trval_list[train_idx] valid_list = trval_list[valid_idx]
len(train_list), len(valid_list), len(test_list)
- traval\_list 파일을 train, valid set으로 나누어주는 함수
<br>
``` python
class VOCDataset(Dataset):
def __init__(self, data_list, mode='train', transforms=None):
self.data_list = data_list
self.mode = mode
self.transforms = transforms
def __len__(self):
return len(self.data_list)
def __getitem__(self, idx):
record = self.data_list[idx]
img_id = record['image_id']
bboxs = record['bboxs']
labels = record['labels']
img = Image.open(image_f.format(self.mode, img_id)).convert('RGB')
img = np.array(img)
if self.transforms:
for t in self.transforms:
sample = self.transforms(image=img, bboxes=bboxs, category_ids=labels)
image = sample['image']
bboxs = np.asarray(sample['bboxes'])
labels = np.asarray(sample['category_ids'])
if self.mode== 'train':
target = encode(bboxs, labels)
return image, target
else:
return image
- 사용자 정의 Dataset
def encode(bboxs, labels): S = feature_size B = num_bboxes N = 5 * B + num_classes cell_size = 1.0 / float(S) box_cxy = (bboxs[:, 2:] + bboxs[:, :2]) / 2.0 box_wh = (bboxs[:, 2:] - bboxs[:, :2]) target = np.zeros((S,S,N)) for b in range(bboxs.shape[0]): # gt박스 수만큼 반복 cxy, wh, label = box_cxy[b], box_wh[b], labels[b] ij = np.ceil(cxy / cell_size) -1.0 # ceil -> 소수점있으면 무조건 올림 4.1 -> 5 i,j = map(int, ij) # i,j는 셀 번호 0~6 top_left = ij*cell_size # 각 셀의 좌상단 좌표 dxy_norm = (cxy-top_left) / cell_size for k in range(B): # 한 셀당 두개의 박스 target[i, j, 5*k:5*(k+1)] = np.r_[dxy_norm, wh, 1] # confidence에 1 target[j, i, 5*B+label] = 1.0 # 해당label에 1 return target - target data에 대한 encoding을 하는 함수
- target (7 x 7 x 30) 에서 물체의 담당 셀의 정보(confidence, class index)에 1 나머지는 0으로 만들어줌
``` python def get_train_transforms(): return A.Compose([ A.Resize(448,448, always_apply=True, p=1), A.RandomBrightnessContrast(p=0.2), A.HorizontalFlip(), ToTensor(), ],bbox_params = A.BboxParams(format=’albumentations’, label_fields=[‘category_ids’]))
def get_test_transforms(): return A.Compose([ A.Resize(448, 448, always_apply=True, p=1), ToTensor(), ])
- albumentations을 사용하여 transform 정의
- albumentationd은 bbox의 변환도 알아서 같이 해주는 미친 라이브러리!
<br>
``` python
train_ds = VOCDataset(train_list, transforms=get_train_transforms())
valid_ds = VOCDataset(valid_list, transforms=get_test_transforms())
test_ds = VOCDataset(test_list, mode='test', transforms=get_test_transforms())
# torch tensor를 batch size만큼 묶어줌
def collate_fn(batch):
images, targets = zip(*batch)
return torch.cat([img.reshape(-1, 3, 448, 448) for img in images], 0), torch.FloatTensor(targets)
def test_collate_fn(batch):
images = batch
return torch.cat([img.reshape(-1, 3, 448, 448) for img in images], 0)
train_loader = DataLoader(train_ds, batch_size=32, shuffle=True, collate_fn = collate_fn)
valid_loader = DataLoader(valid_ds, batch_size=32, shuffle=True, collate_fn = collate_fn)
test_loader = DataLoader(test_ds, batch_size=1, shuffle=True, collate_fn = test_collate_fn)
-
DataLoader 정의
```python class YOLO_v1(nn.Module): def init(self, num_classes=20, num_bboxes=2): super(YOLO_v1, self).init()self.feature_size = 7 self.num_bboxes = num_bboxes self.num_classes = num_classes self.conv = nn.Sequential( nn.Conv2d(in_channels=3, out_channels=64, kernel_size=7, stride=2, padding=4), # nn.BatchNorm2d(64), nn.LeakyReLU(0.1, inplace=True), nn.MaxPool2d(kernel_size=2, stride=2), nn.Conv2d(in_channels=64, out_channels=192, kernel_size=3, stride=1, padding=1), # nn.BatchNorm2d(192), nn.LeakyReLU(0.1, inplace=True), nn.MaxPool2d(kernel_size=2, stride=2), nn.Conv2d(in_channels=192, out_channels=128, kernel_size=1, stride=1, padding=0), # nn.BatchNorm2d(128), nn.LeakyReLU(0.1, inplace=True), nn.Conv2d(in_channels=128, out_channels=256, kernel_size=3, stride=1, padding=1), # nn.BatchNorm2d(256), nn.LeakyReLU(0.1, inplace=True), nn.Conv2d(in_channels=256, out_channels=256, kernel_size=1, stride=1, padding=0), # nn.BatchNorm2d(256), nn.LeakyReLU(0.1, inplace=True), nn.Conv2d(in_channels=256, out_channels=512, kernel_size=3, stride=1, padding=1), # nn.BatchNorm2d(512), nn.LeakyReLU(0.1, inplace=True), nn.MaxPool2d(kernel_size=2, stride=2), nn.Conv2d(in_channels=512, out_channels=256, kernel_size=1, stride=1, padding=0), # nn.BatchNorm2d(256), nn.LeakyReLU(0.1, inplace=True), nn.Conv2d(in_channels=256, out_channels=512, kernel_size=3, stride=1, padding=1), # nn.BatchNorm2d(512), nn.LeakyReLU(0.1, inplace=True), nn.Conv2d(in_channels=512, out_channels=256, kernel_size=1, stride=1, padding=0), # nn.BatchNorm2d(256), nn.LeakyReLU(0.1, inplace=True), nn.Conv2d(in_channels=256, out_channels=512, kernel_size=3, stride=1, padding=1), # nn.BatchNorm2d(512), nn.LeakyReLU(0.1, inplace=True), nn.Conv2d(in_channels=512, out_channels=256, kernel_size=1, stride=1, padding=0), # nn.BatchNorm2d(256), nn.LeakyReLU(0.1, inplace=True), nn.Conv2d(in_channels=256, out_channels=512, kernel_size=3, stride=1, padding=1), # nn.BatchNorm2d(512), nn.LeakyReLU(0.1, inplace=True), nn.Conv2d(in_channels=512, out_channels=256, kernel_size=1, stride=1, padding=0), # nn.BatchNorm2d(256), nn.LeakyReLU(0.1, inplace=True), nn.Conv2d(in_channels=256, out_channels=512, kernel_size=3, stride=1, padding=1), # nn.BatchNorm2d(512), nn.LeakyReLU(0.1, inplace=True), nn.Conv2d(in_channels=512, out_channels=512, kernel_size=1, stride=1, padding=0), # nn.BatchNorm2d(512), nn.LeakyReLU(0.1, inplace=True), nn.Conv2d(in_channels=512, out_channels=1024, kernel_size=3, stride=1, padding=1), # nn.BatchNorm2d(1024), nn.LeakyReLU(0.1, inplace=True), nn.MaxPool2d(kernel_size=2, stride=2), nn.Conv2d(in_channels=1024, out_channels=512, kernel_size=1, stride=1, padding=0), # nn.BatchNorm2d(512), nn.LeakyReLU(0.1, inplace=True), nn.Conv2d(in_channels=512, out_channels=1024, kernel_size=3, stride=1, padding=1), # nn.BatchNorm2d(1024), nn.LeakyReLU(0.1, inplace=True), nn.Conv2d(in_channels=1024, out_channels=512, kernel_size=1, stride=1, padding=0), # nn.BatchNorm2d(512), nn.LeakyReLU(0.1, inplace=True), nn.Conv2d(in_channels=512, out_channels=1024, kernel_size=3, stride=1, padding=1), # nn.BatchNorm2d(1024), nn.LeakyReLU(0.1, inplace=True), nn.Conv2d(in_channels=1024, out_channels=1024, kernel_size=3, stride=1, padding=1), # nn.BatchNorm2d(1024), nn.LeakyReLU(0.1, inplace=True), nn.Conv2d(in_channels=1024, out_channels=1024, kernel_size=3, stride=2, padding=1), # nn.BatchNorm2d(1024), nn.LeakyReLU(0.1, inplace=True), nn.Conv2d(in_channels=1024, out_channels=1024, kernel_size=3, stride=1, padding=1), # nn.BatchNorm2d(1024), nn.LeakyReLU(0.1, inplace=True), nn.Conv2d(in_channels=1024, out_channels=1024, kernel_size=3, stride=1, padding=1), # nn.BatchNorm2d(1024), nn.LeakyReLU(0.1, inplace=True), ) self.fc = nn.Sequential( Flatten(), nn.Linear(in_features=7*7*1024, out_features=4096), nn.LeakyReLU(0.1, inplace=True), nn.Dropout(p=0.5), nn.Linear(in_features=4096, out_features=(feature_size*feature_size*(5*num_bboxes+num_classes))), nn.Softmax() ) self.init_weight(self.conv) self.init_weight(self.fc)def forward(self, x): s,b,c = self.feature_size, self.num_bboxes, self.num_classes
x = self.conv(x) x = self.fc(x) x = x.view(-1, s, s, (5 * b + c)) return xdef init_weight(self, modules): for m in modules: if isinstance(m, nn.Conv2d): nn.init.kaiming_normal_(m.weight, mode=’fan_in’, nonlinearity=’leaky_relu’) if m.bias is not None: nn.init.constant_(m.bias, 0) elif isinstance(m, nn.BatchNorm2d): nn.init.constant_(m.weight, 1) nn.init.constant_(m.bias, 0) elif isinstance(m, nn.Linear): nn.init.normal_(m.weight, 0, 0.01) nn.init.constant_(m.bias, 0)
class Squeeze(nn.Module): def init(self): super(Squeeze, self).init()
def forward(self, x):
return x.squeeze()
class Flatten(nn.Module): def init(self): super(Flatten, self).init()
def forward(self, x):
return x.view(x.size(0), -1) ```
- YOLO v1 모델 정의
def compute_iou(bbox1, bbox2): ''' Compute the IOU (Intersection over Union) of two set of bboxes, each bbox format: [x1,y1,x2,y2] :param bbox1: (Tensor) bounding boxes, sized [N,4] :param bbox2: (Tensor) bounding boxes, sized [N,4] :return: (Tensor) IoU, sized [N, M]. ''' N = bbox1.size(0) M = bbox2.size(0) # Compute left-top coordinate of the intersections lt = torch.max( bbox1[:, :2].unsqueeze(1).expand(N, M, 2), # [N,2] -> [N,1,2] -> [N,M,2] bbox2[:, :2].unsqueeze(0).expand(N, M, 2) # [M,2] -> [1,M,2] -> [N,M,2] ) # Compute right-bottom coordinate of the intersections rb = torch.min( bbox1[:, 2:].unsqueeze(1).expand(N, M, 2), # [N,2] -> [N,1,2] -> [N,M,2] bbox2[:, 2:].unsqueeze(0).expand(N, M, 2) # [M,2] -> [1,M,2] -> [N,M,2] ) # Compute area of the intersections from the coordinates wh = rb - lt # width and height of the intersection, [N,M,2] wh[wh < 0] = 0 # clip at 0 inter = wh[:, :, 0] * wh[:, :, 1] # [N,M] # Compute area of the bboxes area1 = (bbox1[:, 2] - bbox1[:, 0]) * (bbox1[:, 3] - bbox1[:, 1]) # [N,] area2 = (bbox2[:, 2] - bbox2[:, 0]) * (bbox2[:, 3] - bbox2[:, 1]) # [N,] area1 = area1.unsqueeze(1).expand_as(inter) # [N,] -> [N, 1] -> [N,M] area2 = area2.unsqueeze(0).expand_as(inter) # [N,] -> [N, 1] -> [N,M] # Compute IoU from the areas union = area1 + area2 - inter iou = inter / union return iou - IOU(Intersection Over Union)를 계산해주는 함수
def loss_fn(pred_tensor, target_tensor): """ Compute loss for YOLO training. Args: pred_tensor: (Tensor) predictions, sized [n_batch, S, S, Bx5+C], 5=len([x, y, w, h, conf]). target_tensor: (Tensor) targets, sized [n_batch, S, S, Bx5+C]. Returns: (Tensor): loss, sized [1, ]. """ S, B, C = feature_size, num_bboxes, num_classes N = 5 * B + C # 5=len([x, y, w, h, conf] lambda_coord = 5 lambda_noobj = 0.5 batch_size = pred_tensor.size(0) coord_mask = target_tensor[:, :, :, 4] > 0 # mask for the cells which contain objects. [n_batch, S, S] noobj_mask = target_tensor[:, :, :, 4] == 0 # mask for the cells which not contain objects [n_batch, S, S] coord_mask = coord_mask.unsqueeze(-1).expand_as(target_tensor) # [n_batch, S, S] -> [n_batch, S, S, N] noobj_mask = noobj_mask.unsqueeze(-1).expand_as(target_tensor) # [n_batch, S, S] -> [n_batch, S, S, N] coord_pred = pred_tensor[coord_mask].view(-1, N) # pred tensor on the cells which contain objects. [n_coord, N] # n_coord: numver of the cells which contain objects. bbox_pred = coord_pred[:, :5*B].contiguous().view(-1, 5) # [n_coord x B, 5=len([x, y, w, h, conf])] class_pred = coord_pred[:, 5*B:] # [n_coord, C] coord_target = target_tensor[coord_mask].view(-1, N) # target tensor on the cells which contain objects. [n_coord, N] bbox_target = coord_target[:, :5*B].contiguous().view(-1, 5) # [batch*7*7*2, 5] class_target = coord_target[:, 5*B:] # Compute loss for the cells with no object bbox noobj_pred = pred_tensor[noobj_mask].view(-1, N) # [n_noobj, N] noobj_target = target_tensor[noobj_mask].view(-1, N) noobj_conf_mask = torch.cuda.ByteTensor(noobj_pred.size()).fill_(0) # [n_noobj, N] for b in range(B): noobj_conf_mask[:, 4+B*5] = 1 # noobj_conf_mask[:, 4] = 1; noobj_conf_mask[:, 9] = 1 noobj_pred_conf = noobj_pred[noobj_conf_mask] # [n_noobj, 2=len([conf1, conf2])] noobj_target_conf = noobj_target[noobj_conf_mask] # No object confidence loss (SSE) loss_noobj = F.mse_loss(noobj_pred_conf, noobj_target_conf, reduction='sum') # Compute loss for the cells with objects coord_response_mask = torch.cuda.ByteTensor(bbox_target.size()).fill_(0) # [n_coord x B, 5] coord_not_response_mask = torch.cuda.ByteTensor(bbox_target.size()).fill_(1) # [n_coord x B, 5] bbox_target_iou = torch.zeros(bbox_target.size()).cuda() # [n_coord x B, 5], only the last 1=(conf,) is used # Choose the predicted bbox having the highest IoU for each target bbox for i in range(0, bbox_target.size(0), B): pred = bbox_pred[i:i + B] # predicted bboxes at i-th cell, [B, 5=len([x, y, w, h, conf])] pred_xyxy = Variable(torch.FloatTensor(pred.size())) # [B, 5=len([x1, y1, x2, y2, conf])] # Because (center_x,center_y)=pred[:, 2] and (w,h)=pred[:,2:4] are normalized for cell-size and image-size respectively, # rescale (center_x,center_y) for the image-size to compute IoU correctly. pred_xyxy[:, :2] = pred[:, :2] / float(S) - 0.5 * pred[:, 2:4] pred_xyxy[:, 2:4] = pred[:, :2] / float(S) + 0.5 * pred[:, 2:4] target = bbox_target[ i] # target bbox at i-th cell. Because target boxes contained by each cell are identical in current implementation, enough to extract the first one. target = bbox_target[i].view(-1, 5) # target bbox at i-th cell, [1, 5=len([x, y, w, h, conf])] target_xyxy = Variable(torch.FloatTensor(target.size())) # [1, 5=len([x1, y1, x2, y2, conf])] # Because (center_x,center_y)=target[:, 2] and (w,h)=target[:,2:4] are normalized for cell-size and image-size respectively, # rescale (center_x,center_y) for the image-size to compute IoU correctly. target_xyxy[:, :2] = target[:, :2] / float(S) - 0.5 * target[:, 2:4] target_xyxy[:, 2:4] = target[:, :2] / float(S) + 0.5 * target[:, 2:4] iou = compute_iou(pred_xyxy[:, :4], target_xyxy[:, :4]) # [B, 1] max_iou, max_index = iou.max(0) max_index = max_index.data.cuda() coord_response_mask[i + max_index] = 1 coord_not_response_mask[i + max_index] = 0 # "we want the confidence score to equal the intersection over union (IOU) between the predicted box and the ground truth" # from the original paper of YOLO. bbox_target_iou[i + max_index, torch.LongTensor([4]).cuda()] = (max_iou).data.cuda() bbox_target_iou = Variable(bbox_target_iou).cuda() # BBox location/size and objectness loss for the response bboxes. bbox_pred_response = bbox_pred[coord_response_mask].view(-1, 5) # [n_response, 5] bbox_target_response = bbox_target[coord_response_mask].view(-1, 5) # [n_response, 5], only the first 4=(x, y, w, h) are used target_iou = bbox_target_iou[coord_response_mask].view(-1, 5) # [n_response, 5], only the last 1=(conf,) is used loss_xy = F.mse_loss(bbox_pred_response[:, :2], bbox_target_response[:, :2], reduction='sum') loss_wh = F.mse_loss(torch.sqrt(bbox_pred_response[:, 2:4]), torch.sqrt(bbox_target_response[:, 2:4]), reduction='sum') loss_obj = F.mse_loss(bbox_pred_response[:, 4], target_iou[:, 4], reduction='sum') # Class probability loss for the cells which contain objects. loss_class = F.mse_loss(class_pred, class_target, reduction='sum') # Total loss loss = lambda_coord * (loss_xy + loss_wh) + loss_obj + lambda_noobj * loss_noobj + loss_class loss = loss / float(batch_size) return loss - loss를 구해주는 Loss Function 함수
``` python yolo = YOLO_v1().cuda()
init_lr = 0.001 base_lr = 0.01 optimizer = optim.SGD(yolo.parameters(), lr=init_lr, momentum=0.9, weight_decay=5e-4)
def update_lr(optimizer, epoch, burnin_base, burnin_exp=4.0): if epoch in range(50): lr = init_lr + (base_lr - init_lr) * math.pow(epoch/(50-1), burnin_exp) elif epoch == 50: lr = base_lr elif epoch == 750: lr = 0.001 elif epoch == 1050: lr = 0.0001 else: return
for param_group in optimizer.param_groups:
param_group['lr'] = lr ```
-
모델 인스턴스 생성, optimizer정의, Learning rate schedule 함수
```python start_time = time.time() bl = len(train_loader) # 48 history = {‘total_loss’:[]} for epoch in range(150): tk0 = tqdm(train_loader, total=bl, leave=False) t_loss = 0.0 breaking=Falsefor step, (image, target) in enumerate(tk0): image, target = image.to(device), target.to(device) update_lr(optimizer, epoch, float(step) / float(bl - 1)) output = yolo(image) loss = loss_fn(output, target).cuda()
if math.isnan(loss): print(loss) breaking = True break optimizer.zero_grad() loss.backward() optimizer.step() t_loss += loss.item() history['total_loss'].append(loss.item())if breaking: break
# print statistics tqdm.write(f’[EPOCH : {epoch+1} total_loss: {t_loss/bl} Total_elapesd_time: {(time.time()-start_time)/60}분’)
state = {‘epoch’: epoch, ‘model’: yolo, ‘optimizer’: optimizer} filename = ‘checkpoint_yolov1.pth.tar’ torch.save(state, filename)
print(time.time() - start_time) print(‘Finished Training’)
- Training 진행 (80 epoch까지 약 1시간 30분걸렸음)
<br>
```python
def decode(pred_tensor):
'''
Decode tensor into box coordinates, class labels, and probs_detected.
Args:
pred_tensor: (tensor) tensor to decode sized [S, S, 5 x B + C], 5=(x, y, w, h, conf)
Returns:
boxes: (tensor) [[x1, y1, x2, y2]_obj, ...]. Normalized from 0.0 to 1.0 w.r.t. image width/height, sized [n_boxes, 4].
labels: (tensor) class labels for each detected box, sized [n_boxes]
confidences: (tensor) objectness confidences for each detected box, sized [n_boxes].
class_score: (tensor) scores for most likely class for each detected box, sized [n_boxes,].
'''
S,B,C = feature_size, num_bboxes, num_classes
conf_thresh = 0.1
prob_thresh = 0.1
nms_thresh = 0.5
boxes, labels, confidences, class_scores = [], [], [], []
cell_size = 1.0 / float(S)
conf = pred_tensor[:,:,4].unsqueeze(2) # [7, 7, 1]
for b in range(1,B):
conf = torch.cat((conf, pred_tensor[:,:,5*b+4].unsqueeze(2)), 2)
conf_mask = conf > conf_thresh # [S, S, B]
# TBM, further optimization may be possible by replacing thre following for-loops with tensor opterations.
for i in range(S): # for x-dimension.
for j in range(S): # for y_dimension.
class_score, class_label = torch.max(pred_tensor[j, i, 5*B:], 0) # 해당 셀에서 가장 높은 class score
for b in range(B):
conf = pred_tensor[j, i, 5*b+4]
prob = conf * class_score
if float(prob) < prob_thresh:
continue
# Compute box corner (x1, y1, x2, y2) from tensor.
box = pred_tensor[j, i, 5*b : 5*b+4]
# cell left-top corner. Normalized from 0.0 to 1.0 w.r.t. image width/height
x0y0_normalized = torch.FloatTensor([i,j]) * cell_size
# box center. Normalized from 0.0 to 1.0 w.r.t. image width/height.
xy_normalized = box[:2] * cell_size + x0y0_normalized
# Box width and height. Normalized from 0.0 to 1.0 w.r.t. image width/height.
wh_normalized = box[2:]
box_xyxy = torch.FloatTensor(4) # [4,]
box_xyxy[:2] = xy_normalized - 0.5 * wh_normalized # left-top corner(x1, y1)
box_xyxy[2:] = xy_normalized + 0.5 * wh_normalized # right-bottom corner(x2, y2)
# Append result to the lists
boxes.append(box_xyxy)
labels.append(class_label)
confidences.append(conf)
class_score.append(class_score)
if len(boxes) > 0:
boxes = torch.stack(boxes, 0) # [n_boxes, 4]
labels = torch.stack(labels, 0) # [n_boxes]
confidences = torch.stack(confidences, 0) # [n_boxes]
class_score = torch.stack(class_score, 0) # [n_boxes]
else:
# If no box found, return empty tensors.
boxes = torch.FloatTensor(0, 4)
labels = torch.LongTensor(0)
confidences = torch.FloatTensor(0)
class_scores = torch.FloatTensor(0)
return boxes, labels, confidences, class_score
- 예측결과 Tensor를 다시 boxes, labels, confidences, class_score로 decoding하는 함수
def test_visualize(images, outputs): fig, ax = plt.subplots(1, figsize=(7,7)) img = Image.open(image_f.format('test',test_list[0]['image_id'])) w,h = test_list[0]['image_size'] im = np.asarray(img) ax.imshow(im) for output in outputs: b, l, c, sc = decode(output) if b.shape[0]: # patches.Rectangle(xy,width,height) rect = patches.Rectangle((b[0]*w,b[1]*h),(b[2]-b[0])*w,(b[3]-b[1])*h,linewidth=1,edgecolor='r',facecolor='none') ax.add_path(rect) probs = dict(boxstyle='round', facecolor='red', alpha=.9) plt.text(b[0]*w, b[1]*h, '%s : %.2f'%(classes[l], sc), fontsize=10, color='white', bbox=props) - Test Visualization
End
이번 포스팅에서는 YOLO v1에대해 알아보았다. 지금을 기점으로 차근차근 논문 구현코드를 하나하나씩 뒤집어 엎어 볼 예정이다. 아직은 정말 너무 어렵지만 계속 나아갈 것이다. Keep going
Reference
- Paper- arxiv.org/abs/1506.02640
- PPT - docs.google.com/presentation/d/1aeRvtKG21KHdD5lg6Hgyhx5rPq_ZOsGjG5rJ1HP7BbA/pub?start=false&loop=false&delayms=3000&slide=id.p
- Review- www.youtube.com/watch?v=eTDcoeqj1_w&t=1680s
- YOLO v1 pytorch Colab - wolfy.tistory.com/259?category=903250
- YOLO v1 pytorch Github - github.com/motokimura/yolo_v1_pytorch
Leave a comment